How End-to-End AI and Imitation Learning Are Finally Making Humanoid Robots Useful
The robotics industry is undergoing a massive transformation as companies abandon traditional programming in favor of end-to-end neural networks. By using imitation learning and virtual reality, engineers are teaching humanoid robots to perform complex factory tasks in a matter of hours, unlocking mass commercial deployment.
By Factlen Editorial Team
- AI & Robotics Innovators
- Focused on pushing the technical boundaries of end-to-end models and scaling deployment.
- Commercial Integrators
- Focused on the economics, ROI, and practical factory floor deployment of these systems.
- Safety & Systems Analysts
- Focused on the reliability, black-box risks, and workforce integration challenges of embodied AI.
What's not represented
- · Frontline factory workers
- · Labor union representatives
- · Hardware supply chain vendors
Why this matters
For decades, robots were rigid machines confined to cages and programmed for single, repetitive tasks. The shift to end-to-end neural networks means robots can now learn by watching, adapt to unpredictable environments, and work alongside humans—unlocking a massive transformation in manufacturing, logistics, and eventually, daily life.
Key points
- Humanoid robots are transitioning from lab prototypes to live factory floors, with over 1,000 units deployed at Tesla's Fremont facility alone.
- Engineers have abandoned explicit 'if-then' programming in favor of end-to-end neural networks that translate visual data directly into physical movement.
- Through imitation learning, human operators use VR teleoperation to demonstrate tasks, allowing robots to learn complex skills in just hours.
- Robots practice in GPU-accelerated virtual simulators before transferring their learned behaviors 'zero-shot' to the real world.
- The shift to AI-driven robotics is driving unit costs down toward a $20,000 target, reducing the ROI period for manufacturers to under six months.
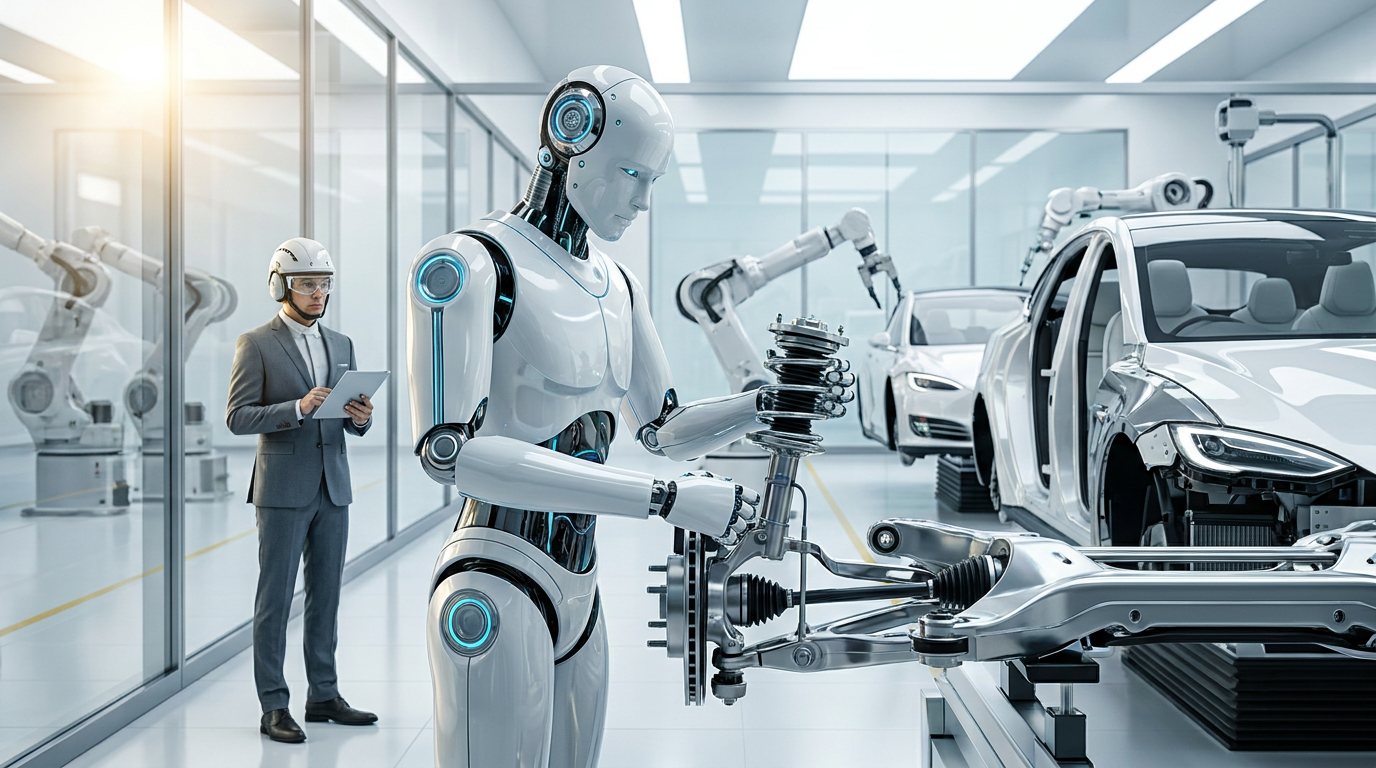
The visual of a humanoid robot walking a factory floor used to be a carefully staged tech demo. In 2026, it is a daily operational reality. At Tesla's Fremont facility, over 1,000 Optimus Gen 3 robots are actively working on the live production line, handling battery cells and routing cables. At BMW's Spartanburg plant, Figure AI's Figure 02 units are performing chassis assembly alongside human workers. This sudden leap from the laboratory to the logistics center was not driven by a breakthrough in motors or metal. It was unlocked by a fundamental shift in artificial intelligence: the transition to end-to-end neural networks and imitation learning.[1][2][4][7]
To understand why this matters, one must look at how robots were traditionally programmed. For decades, roboticists relied on explicit, hand-written code to dictate movement. If an engineer wanted a robot to pick up an object, they had to mathematically define the exact joint angles, the velocity of the arm, and the precise force required by the grippers. This "if-then" programming worked perfectly for bolted-down robotic arms performing identical, repetitive welds on a car chassis. But in dynamic, human-centric environments where objects shift, lighting changes, and obstacles appear unpredictably, explicit coding proved far too brittle.[6][7]
The solution emerged from the same architecture powering modern artificial intelligence and autonomous driving. Instead of writing rules, engineers are now using "end-to-end neural networks." In an end-to-end system, the robot processes raw input—such as video from its cameras and tactile data from its fingers—and directly outputs motor commands, such as torque and joint rotation. There is no middleman code translating the pixels into a 3D map, or a separate module calculating the physics of the grasp. The neural network handles the entire pipeline simultaneously, learning the optimal mapping between what it sees and how it needs to move.[4][6][7]

But how does a neural network learn to fold laundry or sort batteries? The answer is imitation learning, often facilitated by virtual reality teleoperation. Human operators wear VR headsets and haptic gloves, stepping into the "eyes" of the robot. As the human performs a task—like picking up a delicate component—the robot mirrors their movements in real-time. The neural network records the video feed alongside the exact physical actions taken by the operator. After capturing anywhere from 50 to 200 demonstrations, the AI begins to generalize the behavior, learning not just the specific motion, but the underlying intent of the task.[3][7]
While the software is the primary catalyst, the hardware has evolved to match the neural network's capabilities. The latest generation of humanoid hands now features up to 22 degrees of freedom, closely mimicking the biomechanics of the human hand. These "dexterous hands" are equipped with high-resolution tactile sensors in the fingertips, providing the neural network with critical feedback about grip strength and surface friction. This tactile data is fed directly into the end-to-end model, allowing the robot to dynamically adjust its grip on a fragile object, like an egg or a delicate electronic component, without crushing it.[4][7]

Beyond physical imitation, the integration of Large Language Models (LLMs) has given birth to Vision-Language-Action (VLA) architectures. In a VLA system, the robot does not just blindly repeat a recorded motion; it understands the semantic context of its environment. If a human operator says, "Hand me the Phillips-head screwdriver," the robot's cameras identify the tool, the language model processes the request, and the action model executes the physical grasp. This multimodal reasoning allows robots to adapt to slight variations in instructions, making them collaborative partners rather than rigid tools.[1][6][7]
Beyond physical imitation, the integration of Large Language Models (LLMs) has given birth to Vision-Language-Action (VLA) architectures.
Looking beyond human teleoperation, the frontier of robot training in 2026 involves "world models" and self-supervised learning. A world model is an AI system that learns the fundamental laws of physics simply by watching thousands of hours of video. Instead of requiring a human to demonstrate what happens when a glass falls, the world model predicts the outcome based on its understanding of gravity and momentum. This allows the robot to "imagine" scenarios and train itself within a learned, internal simulation, drastically reducing the need for human-provided data.[3][7]
However, human demonstration alone is not enough to build a robust, general-purpose robot. To handle the infinite variability of the physical world, robots must practice. Because training in the real world is slow, expensive, and potentially dangerous, companies rely heavily on GPU-accelerated physics simulators. Platforms like NVIDIA's Isaac allow developers to create highly accurate digital twins of factory environments. Inside these simulators, thousands of virtual robots can practice walking, lifting, and recovering from falls simultaneously, accumulating years of trial-and-error experience in just a few hours.[1][5]

The critical final step is "sim-to-real" transfer. A simulated environment, no matter how detailed, is only an approximation of physical reality. To ensure the robot doesn't fail when it encounters real-world friction or unexpected weight, engineers use "domain randomization." They intentionally alter the physics in the simulator—changing the gravity slightly, adding virtual wind, or making objects artificially slippery. When the neural network learns to succeed across all these randomized conditions, the resulting policy is robust enough to be deployed "zero-shot" onto the physical robot, meaning it works in the real world without requiring further adjustments.[5][7]
The economic implications of this AI-driven approach are profound. By replacing bespoke, labor-intensive programming with scalable machine learning, the cost of humanoid robotics is plummeting. While early prototypes cost upwards of $150,000, the target commercial price for next-generation units like Tesla's Optimus is between $20,000 and $30,000. At that price point, the return on investment for deploying a robot in a high-repetition, ergonomically risky manufacturing role drops from several years to just three to six months. This financial inflection point is what analysts believe will drive the humanoid robot market to an estimated $38 billion by 2035.[1][2][4]

Despite the rapid progress, significant hurdles remain before humanoid robots become ubiquitous. End-to-end neural networks are inherently "black boxes," meaning it can be difficult for engineers to diagnose exactly why a robot made a specific error. If a robot drops a payload or misinterprets a visual cue, there is no line of code to debug; the network must simply be retrained with more diverse data. Furthermore, while imitation learning excels at specific, demonstrated tasks, true generalized reasoning—where a robot encounters a completely novel problem and invents a physical solution on the fly—remains an unsolved challenge in embodied AI.[6][7]
The deployment of thousands of humanoid robots also introduces new questions about workplace integration and safety. Unlike traditional industrial robots, which are caged off from human workers, humanoids are designed to operate collaboratively in shared spaces. This requires the neural networks to maintain an absolute, fail-safe understanding of human proximity and intent. Furthermore, as these robots take over ergonomically risky and repetitive tasks, labor advocates and economists are closely monitoring the transition, emphasizing the need to upskill human workers for roles in robot fleet management and teleoperation.[2][7]
Ultimately, the shift to neural-network-driven robotics represents a democratization of physical automation. Factories that could never afford custom-engineered automation cells may soon be able to purchase a general-purpose robot and teach it a new task simply by showing it what to do. As these models continue to scale, the barrier between digital intelligence and physical capability is rapidly dissolving, promising a future where machines can adapt to our world, rather than requiring us to adapt our world to them.[1][3][7]
How we got here
2023
Tesla replaces explicit driving code with an end-to-end neural network (FSD v12), laying the groundwork for its Optimus robot.
2024
Early humanoid prototypes demonstrate basic locomotion and pre-programmed tasks in controlled laboratory settings.
Late 2025
Figure AI and Tesla begin integrating Vision-Language-Action models, allowing robots to understand natural language commands.
Early 2026
Tesla confirms over 1,000 Optimus Gen 3 units are actively working on the Fremont factory production line.
Mid 2026
Commercial target prices drop to the $20,000 range, shifting the ROI calculation for major manufacturers.
Viewpoints in depth
AI & Robotics Innovators
Focused on the rapid scaling of end-to-end models and the elimination of hand-written code.
For developers at companies like Tesla and Figure AI, the transition to neural networks represents the ultimate unblocking of the robotics industry. They argue that explicit programming was a dead end for general-purpose robots, as the physical world is too complex to capture in 'if-then' statements. By leveraging the same compute clusters and architectures used for autonomous driving and large language models, these innovators believe they can solve physical labor through brute-force data collection and imitation learning, scaling capabilities exponentially rather than linearly.
Commercial Integrators
Focused on the economic viability, ROI, and practical deployment of humanoids on the factory floor.
Industry analysts and manufacturing executives view the AI breakthrough primarily through the lens of unit economics. At $150,000 per robot, humanoids were R&D experiments. At the targeted $20,000 to $30,000 range, they become highly attractive operational expenses that can pay for themselves in under six months. This camp emphasizes that the true test of these neural networks isn't a viral video of a robot doing a backflip, but its ability to perform boring, repetitive tasks—like sorting batteries or routing cables—with 99.9% reliability over an eight-hour shift.
Safety & Systems Analysts
Focused on the inherent risks of deploying 'black box' AI models in physical, human-shared spaces.
While acknowledging the impressive capabilities of end-to-end models, safety researchers highlight the fundamental lack of interpretability in neural networks. When a traditionally programmed robot fails, an engineer can review the code to find the exact mathematical error. When a neural network fails, the reasoning is obscured within millions of weighted parameters. This camp argues that before humanoids can safely transition from structured factories to unstructured public spaces or homes, the industry must develop better diagnostic tools to guarantee fail-safe behaviors in unpredictable edge cases.
What we don't know
- How end-to-end neural networks will handle highly anomalous 'edge cases' that were never encountered in simulation or training data.
- The exact timeline for when these robots will transition from structured factory environments to unstructured consumer homes.
- How the long-term maintenance and degradation of physical robot hardware will impact the accuracy of their AI models.
Key terms
- End-to-End Neural Network
- An AI model that takes raw input (like video pixels) and directly outputs a final action (like motor movement) without relying on intermediate, hand-written code.
- Imitation Learning
- A training method where an AI learns to perform a task by observing and mimicking human demonstrations, often captured via VR teleoperation.
- Sim-to-Real Transfer
- The process of training a robot's AI in a virtual, physics-based simulator and successfully deploying that learned behavior into the physical world.
- Vision-Language-Action (VLA) Model
- An advanced AI architecture that combines visual processing, natural language understanding, and physical movement generation into a single system.
- Domain Randomization
- A simulation technique that intentionally varies physical properties (like gravity or friction) to ensure the AI can handle unpredictable real-world conditions.
Frequently asked
How long does it take to teach a robot a new task?
Using VR teleoperation and imitation learning, a robot can learn a new physical task from just 50 to 200 human demonstrations, often taking only a few hours.
Are these robots fully autonomous?
Yes. While they are trained using human teleoperation, once the neural network learns the task, the robot executes it entirely on its own using its onboard AI.
Why don't engineers just program the movements anymore?
Hand-written code is too rigid for dynamic environments. If an object is slightly out of place, a traditionally programmed robot will fail, whereas a neural network can adapt visually.
How much do these humanoid robots cost?
While early prototypes cost over $150,000, the industry is targeting a commercial price point of $20,000 to $30,000 for mass-produced units.
Sources
Source coverage
7 outlets
3 viewpoints surfaced






[1]Meta IntelligenceAI & Robotics Innovators
Humanoid Robots 2026: Tesla Optimus, Figure 02 & NVIDIA Isaac Status
Read on Meta Intelligence →[2]AI MagicxCommercial Integrators
Humanoid Robots in the Workplace: The 2026 Business Leader's Reality Check
Read on AI Magicx →[3]RoboCloud HubAI & Robotics Innovators
AI Robot Training 2026: Diffusion Policy to Sim-to-Real
Read on RoboCloud Hub →[4]OptimusK BlogAI & Robotics Innovators
AI Training for Tesla Optimus Explained (2026)
Read on OptimusK Blog →[5]Figure AIAI & Robotics Innovators
Natural Humanoid Walk Using Reinforcement Learning
Read on Figure AI →[6]OmdiaCommercial Integrators
Omdia Market Radar: General-purpose Embodied Intelligent Robots, 2026
Read on Omdia →[7]Factlen Editorial TeamSafety & Systems Analysts
Synthesis by Factlen editorial team
Read on Factlen Editorial Team →

Every angle. Every day.
Get ai stories with full source coverage and perspective breakdowns delivered to your inbox.