NASA's ERNEST Rover Prototype Completes 16-Mile Autonomous Desert Test at Record Speeds
NASA's Jet Propulsion Laboratory has successfully field-tested a new four-wheeled rover prototype that can travel ten times faster than current Mars rovers. The ERNEST vehicle autonomously navigated 16 miles of rugged California desert, demonstrating an active suspension system that lifts its wheels over obstacles.
By Factlen Editorial Team
- Planetary Scientists
- Focused on the exponential increase in scientific data collection enabled by faster rovers.
- Robotics & Autonomy Engineers
- Focused on the mechanical and software breakthroughs that allow machines to navigate without human hand-holding.
- Space Exploration Advocates
- Focused on how rapid robotic scouting accelerates the timeline for human settlement on the Moon and Mars.
What's not represented
- · Lunar Geologists
- · Commercial Spaceflight Partners
Why this matters
Current planetary rovers are severely limited by their slow speeds and rigid wheels, restricting how much of a planet they can explore. By proving that autonomous, high-speed navigation is possible over extreme terrain, ERNEST paves the way for ambitious "science road trips" across the Moon and Mars, unlocking previously inaccessible regions like steep crater walls and lunar south pole shadows.
Key points
- NASA's ERNEST prototype rover completed a 16-mile autonomous drive through the Colorado Desert over 37 hours.
- The vehicle reached speeds of 0.6 mph, making it ten times faster than the Perseverance and Curiosity rovers on Mars.
- Unlike legacy rovers, ERNEST uses an Active Gimbal Suspension to individually lift its wheels and step over obstacles.
- The rover's AI navigation system was trained using reinforcement learning, allowing it to make rapid decisions without human input.
- The technology is designed to enable long-range 'science road trips' across the Moon and Mars, accessing previously unreachable terrain.
For nearly three decades, NASA’s robotic explorers have crawled across the Martian surface at a glacial pace, prioritizing survival over speed. That paradigm is poised to shift. NASA’s Jet Propulsion Laboratory (JPL) has successfully concluded a rigorous field test of a new prototype rover designed to travel ten times faster than any vehicle currently operating on another world. The breakthrough promises to fundamentally alter how space agencies plan extraterrestrial missions, transforming localized scientific studies into sweeping planetary expeditions that can cover vast distances in a fraction of the time.[1][6]
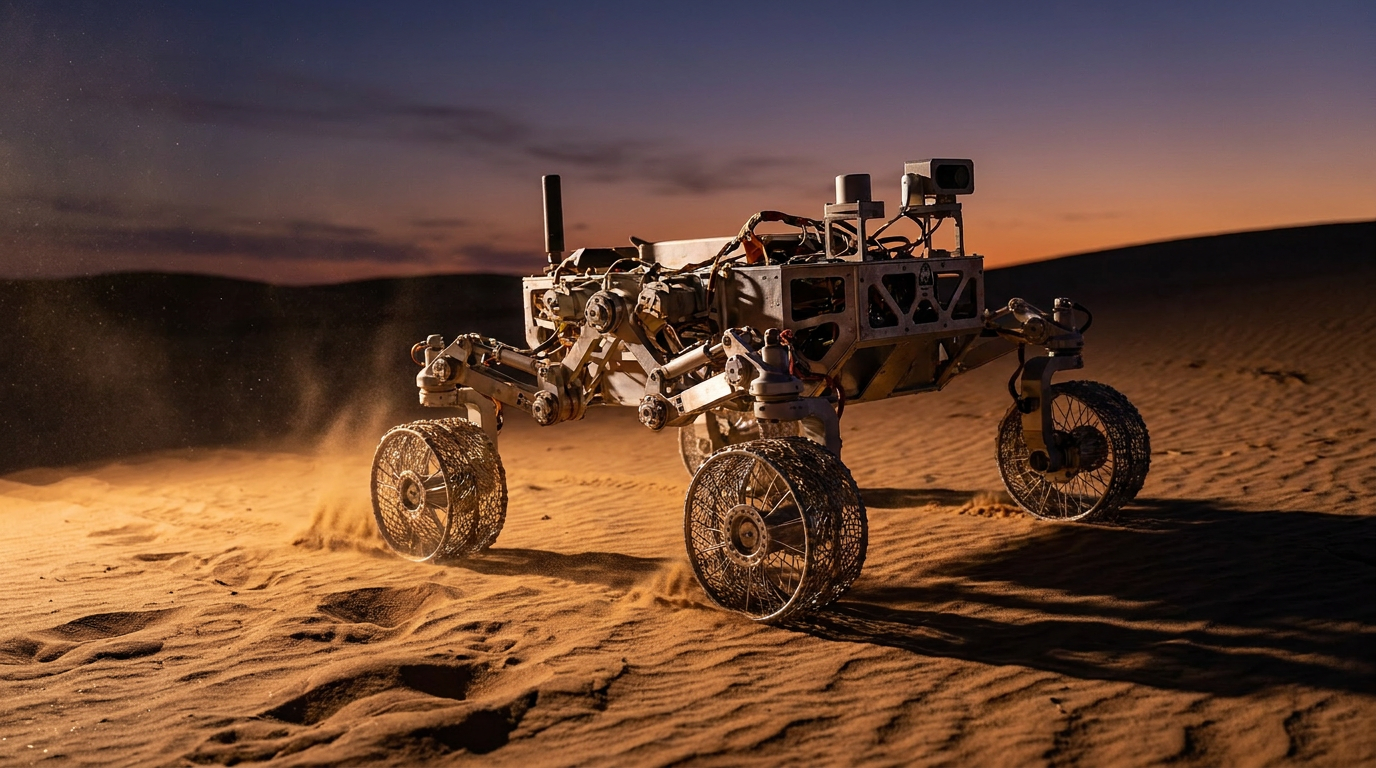
The four-wheeled machine, dubbed ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain), recently completed a 16-mile autonomous traverse across the rugged Colorado Desert in Southern California. Operating with minimal human intervention, the rover accumulated 37 hours of active drive time over a seven-day testing campaign. Engineers trailed the vehicle from a distance, closely monitoring its ability to handle uneven rock formations, extreme slopes, and loose sand without requiring the step-by-step manual commands that define current space operations. The successful deployment marks a critical milestone in developing platforms capable of operating in high-speed, long-range extraterrestrial environments.[4][7]
Reaching top speeds of 0.6 miles per hour, ERNEST represents a quantum leap in planetary mobility. While that pace equates to a leisurely human stroll, it is an order of magnitude faster than NASA’s flagship Perseverance and Curiosity rovers, which top out at roughly 0.06 miles per hour on flat Martian terrain. This dramatic increase in velocity means that future robotic explorers could cover more ground in a single week than previous rovers have managed in over a decade of continuous operation.[1][2]

The sluggish pace of legacy rovers is a deliberate engineering trade-off. Since the Sojourner rover landed in 1997, NASA has relied on the highly successful "rocker-bogie" suspension system. This passive mechanical design uses pivot points and struts to keep all six wheels on the ground at all times, ensuring maximum stability. However, the passive nature of the system severely limits the vehicle's ability to actively adapt to complex obstacles, forcing the rover to slowly drive around hazards rather than tackling them directly.[3][6]
ERNEST discards this legacy constraint in favor of an Active Gimbal Suspension system. Equipped with two powered joints per wheel, the rover can actively manage its weight distribution and articulate its mechanical limbs. This allows ERNEST to individually lift its wheels to step over boulders and ridges that would permanently strand a traditional rover. A built-in clutch mechanism also allows the vehicle to toggle between active and passive suspension on the fly, conserving energy on flat terrain while reserving its active capabilities for rugged environments.[2][6]
The active suspension unlocks entirely new modes of locomotion that border on the biological. Beyond standard forward driving, ERNEST utilizes four steerable wheels to drive sideways or pivot seamlessly in place. When confronted with deep, loose sand or steep inclines that threaten to trap the vehicle, the rover can switch into specialized gaits. By utilizing "squirming" or "wheel-walking" motions, the rover can effectively pull itself out of terrain traps that have doomed previous missions.[2][5]
To complement its mechanical agility, ERNEST features a radical departure in wheel design. Instead of the rigid aluminum wheels that have suffered severe puncture damage on the jagged rocks of Mars, the prototype rides on compliant wire-mesh wheels. These flexible cylinders absorb impacts and conform to the terrain, providing superior traction on unpredictable surfaces while eliminating the risk of catastrophic wheel failure from sharp debris. This material compliance is essential for maintaining high speeds over rocky, uneven ground without shaking the rover's sensitive internal instruments to pieces.[2][6]

To complement its mechanical agility, ERNEST features a radical departure in wheel design.
Hardware is only half of the equation; the rover’s unprecedented speed is equally driven by advances in artificial intelligence. Current Mars rovers rely on cautious navigation software and frequent check-ins with Earth—a process hindered by communication delays of up to 24 minutes each way. ERNEST, by contrast, makes rapid, independent decisions, processing sensor data in real-time to plot optimal paths without waiting for human confirmation. This onboard autonomy allows the vehicle to maintain a continuous, fluid driving pace rather than stopping every few feet to phone home for directions.[5]
JPL engineers trained the rover’s autonomous navigation system using reinforcement learning. Before the physical prototype ever touched the sand, its software spent thousands of hours navigating procedurally generated terrain in JPL’s Dynamics and Real-Time Simulation (DARTS) laboratory. This trial-and-error training allows the onboard AI to instantly recognize hazards and execute complex maneuvers, bridging the gap between slow, deliberate programming and fluid, autonomous movement.[2]
The desert trials also pushed the limits of the rover's optical sensors and decision-making capabilities under extreme environmental stress. To simulate the challenging lighting conditions expected at the lunar south pole—a primary target for upcoming Artemis missions—engineers conducted extensive testing during dusk, dawn, and complete darkness. The autonomous systems successfully navigated the terrain despite the deep, deceptive shadows that typically confuse standard optical navigation software.[4][7]
The implications for planetary science are profound. A rover capable of covering 16 miles in a week fundamentally alters the scope of a mission. For context, the Curiosity rover has driven roughly 21 miles over its entire 14-year lifespan on Mars. ERNEST covered three-quarters of that distance in a matter of days, proving that high-speed, long-range exploration is no longer a theoretical concept.[2]

“You could do a science road trip across the Moon or Mars with this vehicle,” noted James Keane, a JPL planetary scientist involved with the project. By drastically expanding the operational radius, future missions could sample multiple distinct geological zones rather than being confined to a single landing site. This mobility allows scientists to connect the dots between distant geological features, building a much more comprehensive understanding of a planet's history.[3][6]
Furthermore, ERNEST’s ability to tackle slopes of up to 35 degrees opens up previously inaccessible frontiers. Scientists have long sought to explore the steep walls of impact craters, ancient lava tubes, and permanently shadowed lunar craters where water ice is believed to be trapped. Until now, the risk of a rover tipping over or getting stuck made these high-value targets strictly off-limits to robotic explorers. By actively shifting its center of gravity, ERNEST can safely navigate these extreme inclines, unlocking entirely new domains for geological sampling and resource prospecting.[5][6]
While the desert tests were an unequivocal success, ERNEST remains a terrestrial prototype. Transitioning a testbed into a flight-qualified vehicle capable of surviving the violent vibrations of launch, the terror of atmospheric entry, and the freezing radiation of deep space will require years of additional engineering. The complex powered joints of the active suspension must also be hardened against the highly abrasive, static-charged dust found on the Moon and Mars.[2]
NASA has not yet assigned the ERNEST architecture to a specific upcoming launch manifest. However, as the agency prepares for sustained lunar exploration and eventual crewed missions to Mars, the technologies validated in the Colorado Desert ensure that the next generation of robotic explorers will not just survive the alien landscape, but conquer it at unprecedented speeds. The era of the slow, cautious planetary crawler is ending, making way for a new fleet of agile, autonomous machines ready to race across the solar system.[1][3]
How we got here
1997
NASA lands the Sojourner rover on Mars, introducing the passive rocker-bogie suspension system used on all subsequent rovers.
2022
NASA's Jet Propulsion Laboratory begins internal development of the ERNEST prototype to rethink planetary mobility.
2025
The ERNEST prototype undergoes initial mobility and autonomy testing in JPL's Mars Yard obstacle course in Pasadena.
March 2026
The rover completes a 16-mile autonomous field test in the rugged Colorado Desert in Southern California.
June 2026
NASA publicly shares the results and footage of the successful desert trials, demonstrating a tenfold increase in rover speed.
Viewpoints in depth
Planetary Scientists
Focused on the exponential increase in scientific data collection enabled by faster rovers.
For planetary geologists, the primary bottleneck in extraterrestrial research is mobility. Current rovers are confined to a relatively small radius around their landing sites, forcing scientists to extrapolate global planetary history from a localized sample. By increasing traverse speeds tenfold, researchers argue that a single mission could visit multiple distinct geological zones—such as ancient river deltas, volcanic plains, and impact crater walls—transforming a localized study into a true planetary 'road trip.' This expanded range is particularly crucial for upcoming lunar missions targeting the south pole, where water ice is scattered across distant, permanently shadowed craters.
Robotics & Autonomy Engineers
Focused on the mechanical and software breakthroughs that allow machines to navigate without human hand-holding.
From an engineering standpoint, the ERNEST prototype represents a paradigm shift away from the ultra-conservative designs of the past 30 years. Engineers emphasize that the legacy rocker-bogie suspension, while incredibly reliable, fundamentally limits a rover's ability to extract itself from hazards. By introducing an Active Gimbal Suspension and pairing it with reinforcement-learning AI, roboticists are proving that rovers can actively 'fight' their way out of loose sand and step over boulders. This autonomy is essential for deep-space exploration, where communication delays make real-time human joystick control impossible.
Space Exploration Advocates
Focused on how rapid robotic scouting accelerates the timeline for human settlement on the Moon and Mars.
Advocacy groups and space enthusiasts view high-speed rovers as the necessary precursors to human colonization. Before astronauts can safely establish habitats on the Moon or Mars, robotic scouts must map the terrain, locate resource deposits, and identify safe landing zones. Advocates argue that the glacial pace of current rovers is incompatible with the aggressive timelines of the Artemis program and commercial Mars ambitions. A fleet of fast, autonomous rovers like ERNEST could rapidly survey vast swaths of territory, dramatically accelerating the groundwork required for human arrival.
What we don't know
- It is unclear exactly which upcoming lunar or Martian mission will be the first to incorporate ERNEST's active suspension technology.
- Engineers have yet to prove how the complex mechanical joints of the active suspension will hold up against the abrasive, highly static dust found on the Moon and Mars over a multi-year lifespan.
- The final cost and weight penalties of adding powered suspension joints to a flight-ready spacecraft remain unknown.
Key terms
- Active Gimbal Suspension
- A motorized mechanical system that allows a rover to actively lift its wheels, shift its weight, and change its posture to climb over obstacles.
- Rocker-Bogie System
- The passive suspension design used on all NASA Mars rovers since 1997, which relies on pivot points to keep all wheels on the ground without active motors.
- Reinforcement Learning
- An artificial intelligence training method where software learns to make optimal decisions by trial and error in a simulated environment.
- Wheel-walking
- A specialized robotic gait where wheels are lifted and placed individually to 'step' over difficult terrain or escape loose sand.
Frequently asked
Why are current Mars rovers so slow?
Current rovers like Curiosity and Perseverance top out at about 0.06 mph because their passive suspension systems prioritize stability over speed, and their navigation software requires cautious movements to avoid hazards.
Will the ERNEST rover go to Mars?
ERNEST is currently a prototype and testbed. While this specific vehicle won't launch into space, its active suspension and autonomous software will inform the design of future rovers sent to the Moon and Mars.
How does the rover navigate in the dark?
The rover uses advanced autonomous software trained via reinforcement learning, allowing it to process sensor data and make real-time driving decisions even in the deep shadows expected at the lunar south pole.
Sources
Source coverage
7 outlets
3 viewpoints surfaced







[1]EngadgetRobotics & Autonomy Engineers
NASA is testing a rover that can drive faster and lift its wheels to climb obstacles
Read on Engadget →[2]TNWSpace Exploration Advocates
NASA's new rover prototype drove 16 miles in a week, 10 times faster than anything it has on Mars
Read on TNW →[3]Astrobiology WebRobotics & Autonomy Engineers
NASA Testing Advanced Capabilities For Moon And Mars Rovers
Read on Astrobiology Web →[4]HyperAISpace Exploration Advocates
NASA ERNEST Rover Prototype Completes High-Speed Desert Test
Read on HyperAI →[5]Tech NewsRobotics & Autonomy Engineers
NASA ERNEST Rover Is Designed to Be Faster and Tougher
Read on Tech News →[6]NASA Jet Propulsion LaboratoryPlanetary Scientists
NASA Testing Advanced Capabilities for Moon, Mars Rovers
Read on NASA Jet Propulsion Laboratory →[7]Friends of NASAPlanetary Scientists
Field-Testing Rover Capabilities for The Moon & Mars | NASA/JPL
Read on Friends of NASA →


Every angle. Every day.
Get technology stories with full source coverage and perspective breakdowns delivered to your inbox.